기술기고문
운전자 보조에서 운전자 대체로! 인지 자동차 실현의 핵심인 고충실도의 센서 데이터
글: 크리스 제이콥스(Chris Jacobs) 자율 교통 및 자동차 안전 사업부 부사장 / 아나로그디바이스(Analog Devices, Inc.)
우리는 지금 지난 세기에 이룩한 달착륙과 같은 일대 전환기를 맞고 있다. 센서에서부터 인공 지능(AI)에 이르기까지 전자 업계 전반에 걸쳐서 자율주행차를 안전하게 만들기 위한 협력망이 구축되고 있다. 운전자, 탑승자, 보행자를 안전하게 보호하기 위해 하드웨어 및 소프트웨어 개발 측면에서 해결해야 할 많은 과제들이 있다. 이를 위해 중요한 역할을 하는 것이 머신 러닝과 AI이다. 머신 러닝과 AI가 효과적으로 활용될 수 있으려면 데이터 품질이 중요하다. 고성능의 충실도 높은 센서 신호 체인을 바탕으로 하지 않고서는 어떤 자율주행차도 안전하다고 할 수 없다. 정확한 데이터를 일관되게 제공하는 것은 도로 위에서 생사를 좌우할 만큼 중요한 문제이다.
최초의 달 탐사선을 쏘아 올릴 때와 마찬가지로, 안전한 자율주행차를 실현하기까지 도로 상에는 많은 장애물이 존재한다. 최근 자율주행차와 관련해 사람들의 관심을 집중시켰던 사고들은 회의론자들의 주장에 힘을 실어주는 것 같이 보인다. 이들은 자동차와 자동차 주행 환경이 너무나 복잡하고, 변수들도 굉장히 많이 작용하며, 알고리즘과 소프트웨어는 여전히 오류 투성이라고 말한다. ISO 26262 자동차 기능 안전성 표준에 대한 적합성 테스트에 어떤 식으로든 관여해본 사람이라면, 회의론적 입장에 서는 것이 충분히 이해가 될 것이다. 이러한 회의적 시각은 2017년에 실리콘 밸리에서 5개 자율주행차 회사들을 대상으로 실시한 테스트에서 실제 주행거리(마일)와 자율 모드 해제 건수를 비교한 표에서도 확인할 수 있다(그림 1). 2019년도 조사는 아직 나오지 않았으나, 온라인 상에서 각 업체별 관련 자료들을 찾아볼 수는 있을 것이다.
사정이 이렇기는 하지만 목표는 확고하고 길은 정해져 있다. 자율주행차는 점점 더 현실로 다가오고 있으며, 안전성이 무엇보다 중요하다. 2018년에 캘리포니아주 차량국(DMV)의 비공식적인 자율주행차 조사에 따르면, 주행거리(마일)당 자율 모드 해제 건수가 줄어들고 있는 것으로 나타났다. 이것은 시스템 성능이 점점 나아지고 있다는 표시이기도 하다. 하지만 이 개선 속도는 더 빨라져야 한다.
협력과 새로운 사고의 필요성을 인식한 자동차 회사들이 반도체 회사들과 직접 대화하고 있다. 센서 회사들은 AI 알고리즘 개발 회사와 센서 융합을 논의하고 있으며, 소프트웨어 개발 회사들은 최선의 결과를 도출하기 위해서 하드웨어 회사들과 손을 잡았다. 최종 설계의 성능, 기능성, 신뢰성, 비용 절감, 안전성을 조합적으로 극대화하기 위해서 오래된 관계는 변화를 맞고 있고 새로운 관계들이 역동적으로 형성되고 있다.
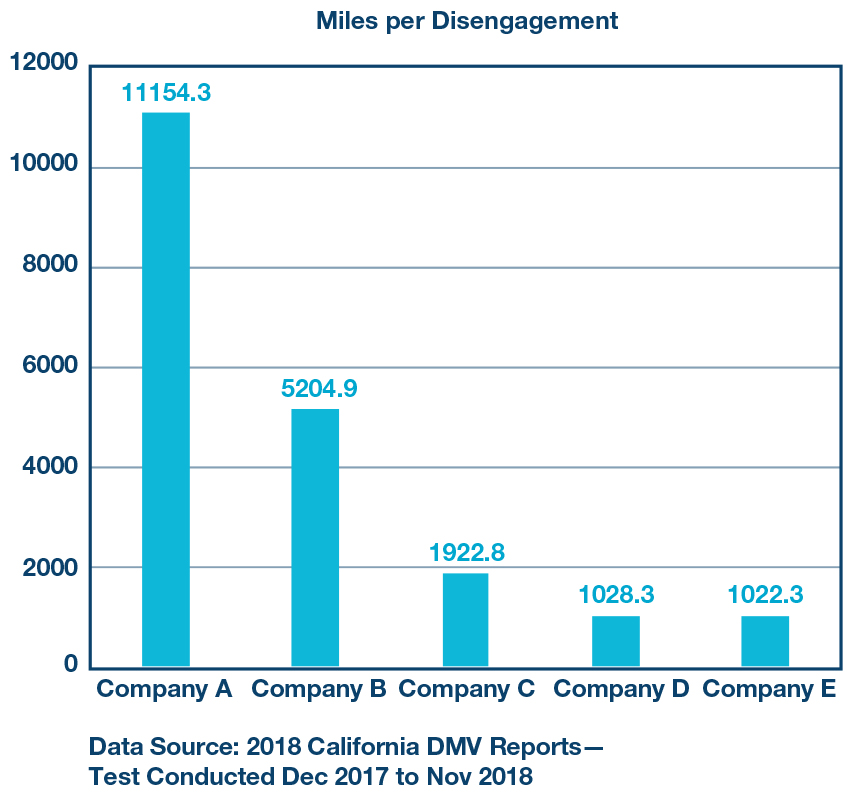
그림 1: 상위 5개 자율주행차 회사들을 대상으로 실시한 테스트에서 자율 주행 모드를 해제하고 주행한 거리(단위: 마일, 조사 기간:2017년 12월 ~ 2018년 11월). 이 기간에 캘리포니아에서 총 28개 기업이 공공 장소에서 주행 시험을 했다. 자율 모드로 주행한 거리는 총 2,036,296마일이고, 자율 모드 해제 건수는 143,720회였다.
자율 주행과 관련된 전체 에코시스템이 로봇택시나 장거리 트럭 운송 같은 새로운 애플리케이션용으로 완전 자율주행차를 구현하고 테스트하기 위한 적합한 모델을 찾고 있다. 이와 함께, 센서 기술의 발전 덕분에 ADAS가 진화함에 따라서 점점 더 높은 수준의 자동화가 가능해졌다.
이러한 센서 기술에는 카메라, LiDAR(light detection and ranging), RADAR(radio detection and ranging), MEMS(microelectromechanical systems), IMU(inertial measurement units), 초음파, GPS가 포함되며, 이 모든 센서 기술이 AI 시스템에 중요한 입력 정보들을 제공한다.
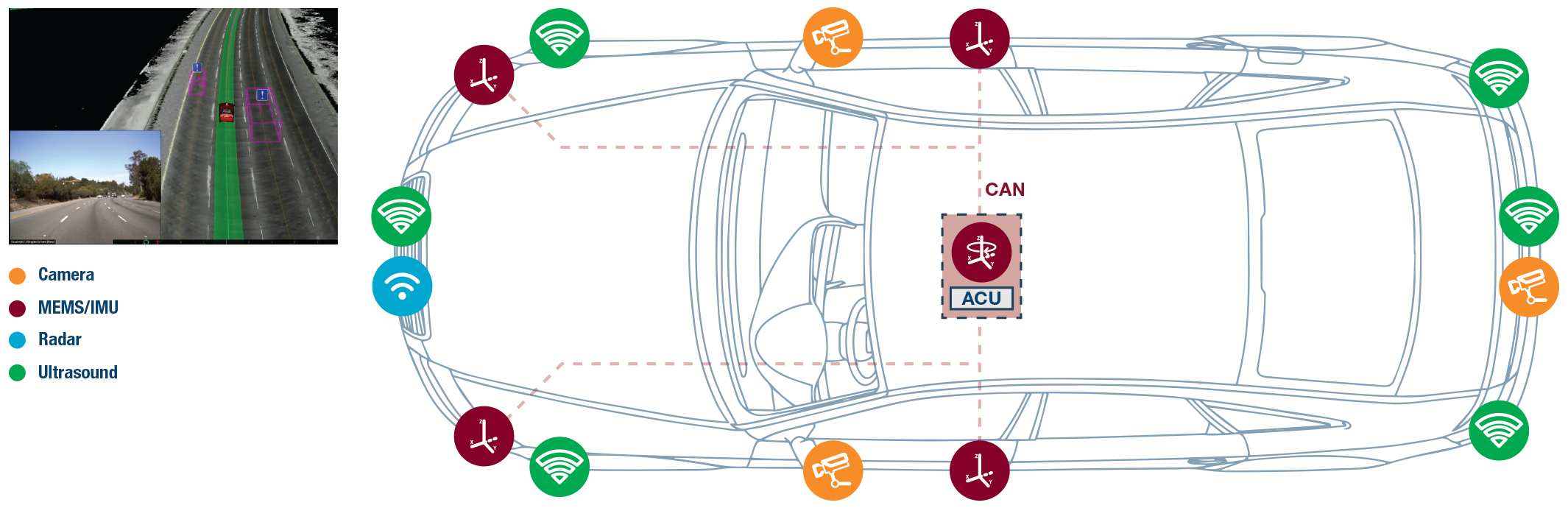
그림 2: ADAS의 인지 및 내비게이션 기능을 위해 다양한 센싱 기술들이 활용된다. 이들 각각의 기술들이 독립적으로 작동하면서 운전자에게 경보를 알리면 운전자가 적절히 대처할 수 있다.
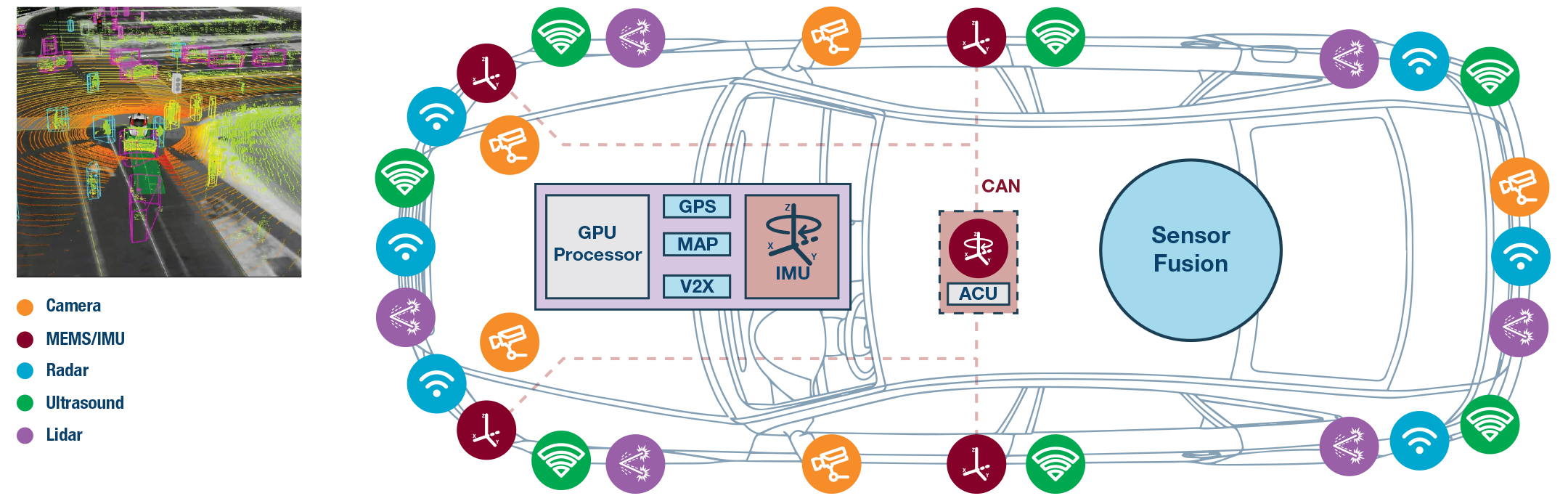
그림 3: 안전한 자율주행차를 위해서는 자신의 상태(위치, 속도, 궤적, 기계적 상태)뿐 아니라 주변의 상태와 특성까지도 감지할 수 있는 고도의 인지 기술들이 필요하다.
예지적 안전성 구현의 토대인 ‘인지 자동차(Cognitive Vehicle)’
자동차의 지능은 자율화 수준에 따라서 구분된다. 레벨 1(L1)과 레벨 2는 주로 경고 시스템으로서 작동하며, 레벨 3 이상의 자동차는 사고를 피하기 위한 조치를 취할 수 있다. 레벨 5에 이르면 운전대가 필요 없이 자동차가 완벽하게 자율적으로 주행할 수 있다.레벨 2에서는 센서 시스템들이 개별적으로 작동한다. 경고 시스템들이 오탐지(false alarm) 비율이 높기 때문에 운전자가 귀찮아서 이 기능을 꺼버릴 수 있다.
완벽한 인지 자율주행차를 구현하려면 센서 수가 크게 늘어나야 한다. 이와 함께 성능과 응답 시간을 크게 향상시켜야 한다(그림 3, 그림 4).
자동차에 더 많은 센서를 사용할수록 타이어 압력, 무게 변화(사람이 타고 있는지 아닌지, 한 사람이 타고 있는지 다섯 사람이 타고 있는지 등) 같은 기계적 상태뿐 아니라 제동이나 핸들링에 영향을 미칠 수 있는 다양한 요인들을 더 잘 모니터링할 수 있다. 더 다양한 센싱 기술을 사용함으로써 자동차가 자신의 상태와 주변을 더 잘 인지할 수 있다.
센싱 기술의 발전 덕분에 자동차가 주변 환경의 현재 상태뿐 아니라 이력까지도 인지할 수 있게 되었다. 이것은 ENSCO의 우주항공 과학 및 엔지니어링 부문 최고 기술 책임자인 조셉 모토라(Joseph Motola) 박사가 개발한 원리 덕분이다. 이 원리 덕분에, 구덩이 위치 같은 도로 상태를 인지하는 간단한 것에서부터 특정 구역에서 시간의 경과에 따라서 어떤 사고가 어떻게 발생했는지 같은 상세한 것까지 감지할 수 있다.
이러한 인지 개념이 처음 등장했을 당시에는 센싱, 프로세싱, 메모리 용량, 커넥티비티 같은 것들이 아직은 무리인 것으로 여겨졌으나, 지금은 많은 것들이 바뀌었다. 이제는 자동차 센서들이 탐지한 실시간 데이터에 이력 데이터를 반영함으로써 점점 더 높은 정확도로 예방적 조치를 취하고 사고를 피할 수 있게 되었다.
일례로 IMU를 사용하면 구덩이나 장애물을 만났을 때 갑작스러운 덜컹거림을 감지할 수 있다. 과거에는 이 정보를 활용할 수 있는 방법이 없었으나, 이제는 실시간 커넥티비티를 통해서 이 데이터를 중앙의 데이터베이스로 전송하고 다른 자동차들에게 구덩이나 장애물이 있다는 것을 알려줄 수 있다. 카메라,레이더, LiDAR, 그 밖에 다른 센서 데이터도 마찬가지다.
이들 데이터를 취합, 분석, 융합함으로써 자동차가 자신의 주변 환경을 인지할 수 있다. 그럼으로써 자동차는 학습하는 기계가 되어서 사람보다 더 빠르고 안전하게 의사결정을 할 수 있다.
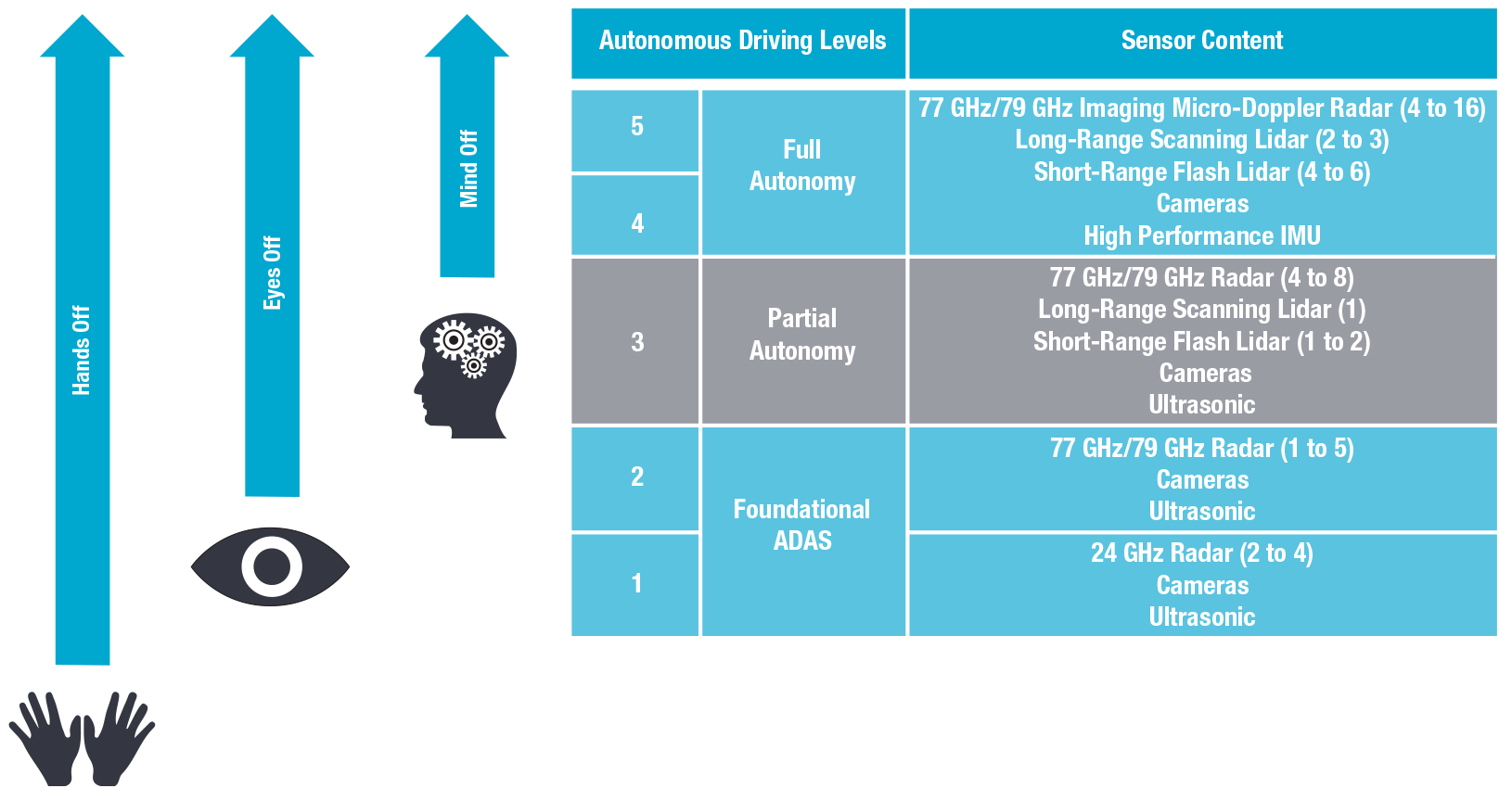
그림 4: 자율 주행 레벨과 센서 요건
다면적 의사결정 및 분석
오늘날 자동차의 인지 능력은 빠르게 진보하고 있다. 다양한 센서들로부터 데이터를 수집하고 다양한 조건 하에서 센서 융합을 통해 각자의 강점을 극대화하면서 서로의 약점을 보완할 수 있다(그림 5).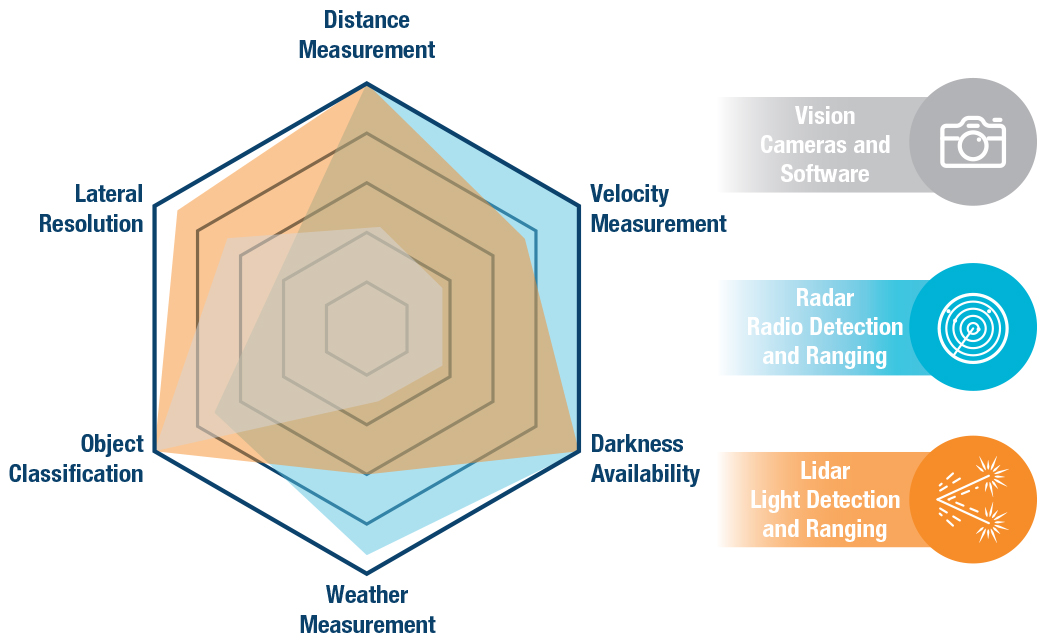
그림 5: 각 센싱 방식마다 강점과 약점이 있으며, 센서 융합을 통해서 그러한 강점과 약점을 상호 보완할 수 있다.
하지만 업계가 당면한 과제들을 해결하기 위해서는 아직 해야 할 일이 많다. 예컨대 카메라는 횡방향 속도를 계산할 수 있다(자동차가 주행하는 방향과 직교 방향으로 움직이는 물체의 속도를 계산할 수 있다). 그런데 아무리 우수한 머신 러닝 알고리즘이라 하더라도 충분히 낮은 오탐지 비율로 횡방향 움직임을 감지하기 위해서는 최장 300ms까지의 시간이 필요하다. 자동차 전방에서 보행자가 시속 100km로 움직이고 있다고 했을 때, 수 밀리초의 시간은 가벼운 상처만 일으키느냐 아니면 생명을 위협하는 사고를 일으키느냐의 차이를 만들어낼 수 있다. 이처럼 응답 시간은 매우 중요한 문제이다.
300ms의 지연시간이 필요한 이유는 연속적인 비디오 프레임들로부터 델타 벡터를 계산하기 위해서다. 신뢰할 수 있는 감지를 위해서는 10개 이상의 연속 프레임이 필요한데, 이를 1 ~ 2개의 연속 프레임으로 줄여야 한다. 이렇게 할 수 있는 것이 레이더이다.
레이더는 속도 및 물체 감지용으로 많은 이점을 가지고 있다. 방위각과 고도각 둘 다 분해능이 높을 뿐만 아니라, 돌아가면서 주변을 볼 수 있다. 하지만 레이더 역시 자동차가 반응하기 위해서는 시간이 필요하다. 시속 400km 이상의 유효 속도를 감지할 수 있도록 77 ~ 79GHz로 새로운 개발들이 진행되고 있다. 이 정도의 속도 감지는 너무 높은 것이 아닌가 생각될 수도 있으나, 자동차가 서로 반대 방향으로 시속 200km 이상으로 주행하는 복잡한 고속도로 같은 활용 사례를 지원하려면 이 정도의 수준은 필요하다.
카메라와 레이더 사이의 틈새를 메우는 것이 LiDAR이다. LiDAR는 고도의 인지 자동차를 실현하는 데 있어서 필수적인 역할을 한다(그림 6). 하지만 LiDAR 역시 극복해야 할 과제들을 안고 있다.
LiDAR는 자동차 곳곳에 설치해서 전체적인 360° 커버리지가 가능하도록 컴팩트하면서 경제적인 가격대의 첨단 설계로 진화하고 있다. LiDAR는 레이더와 카메라 시스템을 보완하면서, 더 높은 각도 분해능과 깊이감을 추가하고 주변에 대한 좀더 정확한 3D 맵을 제공할 수 있다.
하지만 LiDAR는 근적외선(IR, 850nm~940nm)으로 작동되므로 사람의 망막에 해로울 수 있어 에너지 출력을 905nm로, 펄스당 200nJ로 엄격히 제한하고 있다. 이를 1500nm 이상의 단파 IR로 옮기면 빛이 전체적인 눈 표면에 흡수된다. 따라서 펄스당 8mJ로 규제 요건을 완화할 수 있다. 905nm LiDAR의 4만 배 에너지 수준에서, 1500nm 펄스형 LiDAR 시스템은 4배 더 긴 거리를 제공한다. 또한 1500nm 시스템은 안개, 먼지, 미세 에어로졸 같은 환경 조건에 대해서 더 견고하다.
1500nm LiDAR의 과제는 시스템 비용이다. 이 비용은 주로 광검출기 기술에 의해서 좌우된다(오늘날에는 주로 InGaAs 기술 기반). 1500nm LiDAR를 위해서는 감도가 높고 암전류가 낮고 커패시턴스가 낮은 고품질 솔루션이 필요하다. 또한 LiDAR 시스템이 2세대와 3세대로 진화하면서 애플리케이션 용도에 따른 회로 통합을 통해 크기, 전력, 전반적인 시스템 비용을 낮추는 것이 필요할 것이다.
초음파, 카메라,레이더, LiDAR, 외에도, 고도의 인지 자율주행차를 위해서는 또 다른 센싱 방식들이 사용될 수 있다. GPS를 사용하면 자동차 자신이 어디에 있는지 파악할 수 있다. 하지만 터널이나 고층 빌딩 같이 GPS 신호가 닿지 못하는 장소들이 있을 수 있다. 이러한 경우에 중요한 역할을 하는 것이 IMU이다.
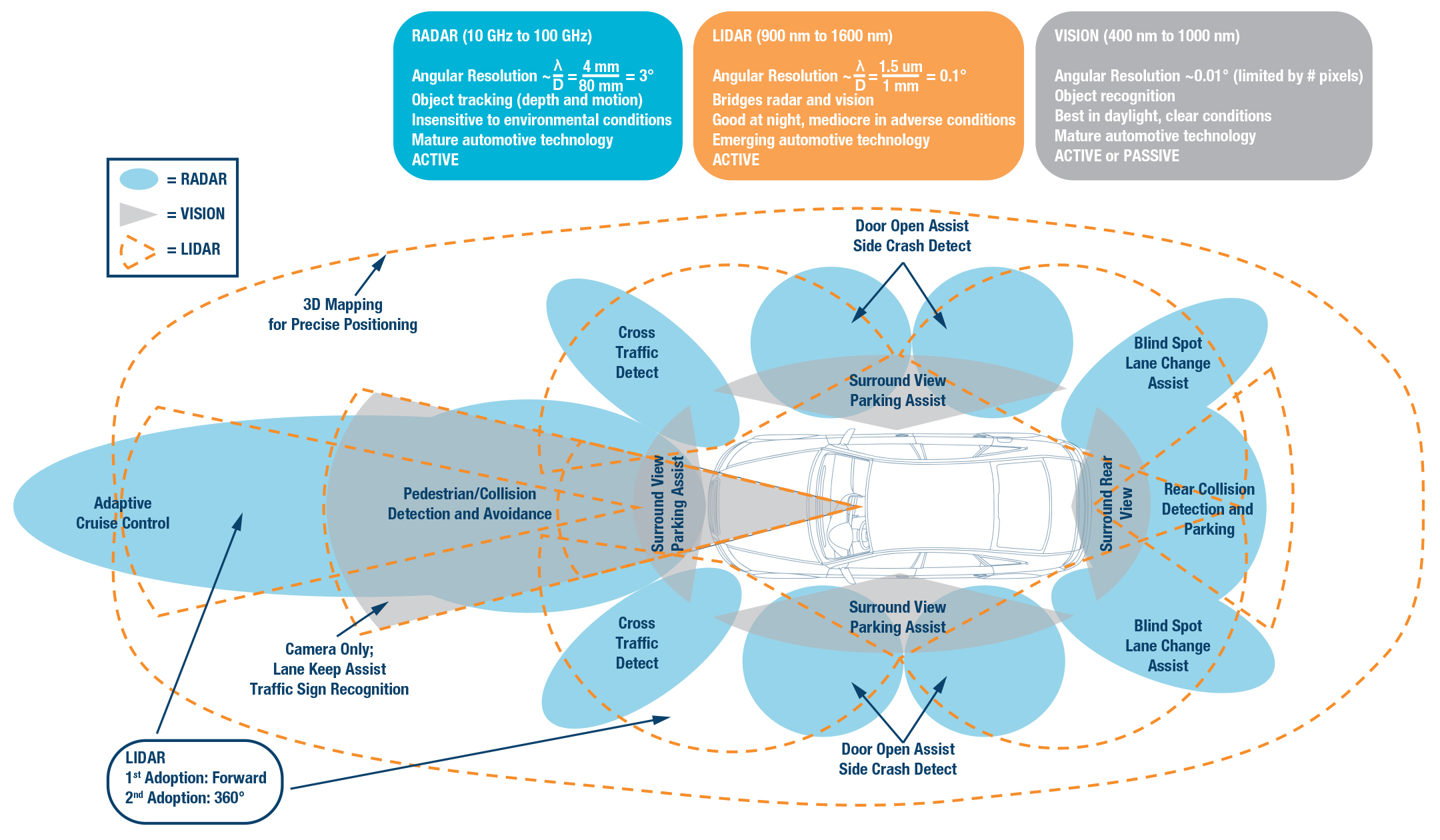
그림 6: 고도의 인지 자동차는 첨단 레이더, LiDAR, 카메라, 그 밖에 IMU와 초음파까지 사용해서 360°를 볼 수 있게 될 것이다.
IMU는 중력에 의존한다. 중력은 환경 조건에 상관 없이 일정하다. 그러므로 추측 항법(dead reckoning)에 매우 유용하다. 일시적으로 GPS 신호를 사용할 수 없게 되었을 때 추측 항법으로 속도계와 IMU 같은 소스들로부터의 데이터를 사용해서 이동한 거리와 방향을 감지하고 이 데이터를 고해상도 지도에 표시한다. 그럼으로써 GPS 신호가 복구될 때까지 인지 자동차가 올바른 경로를 유지할 수 있도록 한다.
고품질 데이터의 중요성
어떤 센싱 방식을 사용하느냐도 중요하지만, 센서 자체가 신뢰할 수 없고 출력 신호를 정확하게 포착하지 못한다면 아무리 중요한 센서 입력이라 하더라도 쓸모가 없을 것이다. “쓰레기를 투입하면 쓰레기가 출력될 것”이기 때문이다.따라서 이미 발전된 아날로그 신호 체인을 지금보다 더 향상시켜야 할 것이다. 센서 신호 출력을 검출, 포착 및 디지털화 하면서 정확도와 정밀도가 시간과 온도에 따라서 달라지지 않도록 해야 한다. 적절한 부품을 선택해서 제품 설계를 잘 한다면 온도에 따른 바이어스 드리프트, 위상 잡음, 간섭, 그 밖에 불안정성을 야기하는 까다로운 문제들을 줄일 수 있을 것이다. 머신 러닝 및 AI 프로세서를 적절히 학습시키고 실전에 투입해서 의사결정을 잘 하도록 하기 위해서는 고정밀/고품질 데이터가 필요하다. 도로 위에서 두 번째 기회란 없기 때문이다.
우수한 데이터 품질을 확보했다면, 다양한 센서 융합 기법과 AI 알고리즘을 활용해서 최상의 결과를 도출할 수 있다. AI 알고리즘을 아무리 잘 학습시킨다고 하더라도, 네트워크 에지 상의 디바이스에 모델을 컴파일하고 구축했을 때 전적으로 의지해야 하는 것은 신뢰할 수 있는 고정밀 센서 데이터이다.
다양한 센서 기술, 센서 융합, 신호 처리, AI의 상호작용은 지능적인 인지 자율주행차의 진화를 위해서 중요할 뿐만 아니라 운전자, 탑승자, 보행자의 안전을 위해서도 중요하다. 이 모든 것들은 고도로 신뢰할 수 있고 정확하고 정밀한 센서 정보가 없으면 도저히 불가능하다. 안전한 자율주행차를 위한 토대를 이루는 것이 바로 이러한 데이터이다.
모든 첨단 기술이 그렇듯이, 기술 개발을 하면 할수록 해결해야 할 보다 더 복잡한 활용 사례들이 등장한다. 그만큼 기술은 점점 더 복잡해질 것이고, 그러한 문제들을 해결하기 위해서 차세대 센서와 센서 융합 알고리즘이 요구될 것이다.
지난 세기의 달 착륙 때와 마찬가지로, 자율주행차는 앞으로 우리 사회에 근본적인 변화를 가져올 것이다. 운전자 보조에서 운전자 대체로 진화하면서 자동차의 안전성을 크게 향상시킬 뿐 아니라 생산성을 끌어올릴 것이다. 이 모든 것의 토대가 바로 센서이다.
아나로그디바이스(Analog Devices)는 25년 넘게 자동차 안전성과 ADAS에 관련된 개발을 해왔다. 미래의 자율주행차를 실현할 수 있는 토대를 마련하고 있다. 관성 항법과 모니터링, 고성능 레이더와 LiDAR에 중점을 두고, 시스템 성능을 크게 향상시킬 뿐만 아니라 전체적인 플랫폼 유지비용을 절감할 수 있는 고성능 센서 및 신호/전력 체인 솔루션을 제공한다.
제품스펙